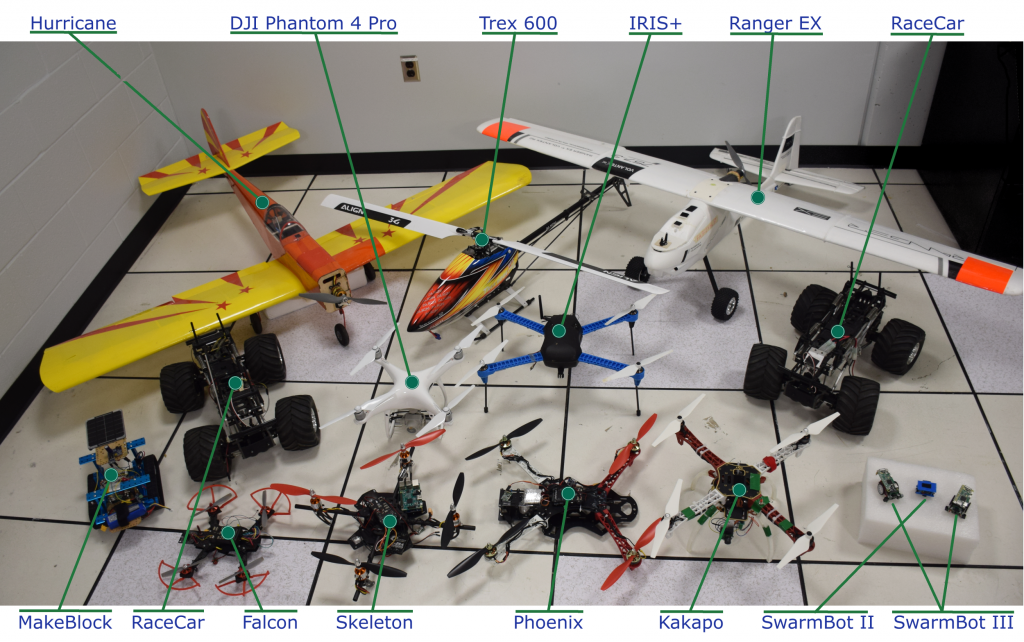
Unmanned Aerial Vehicles (UAVs)
|
DJI Matrice 210 |
DJI Phantom 4 Pro |
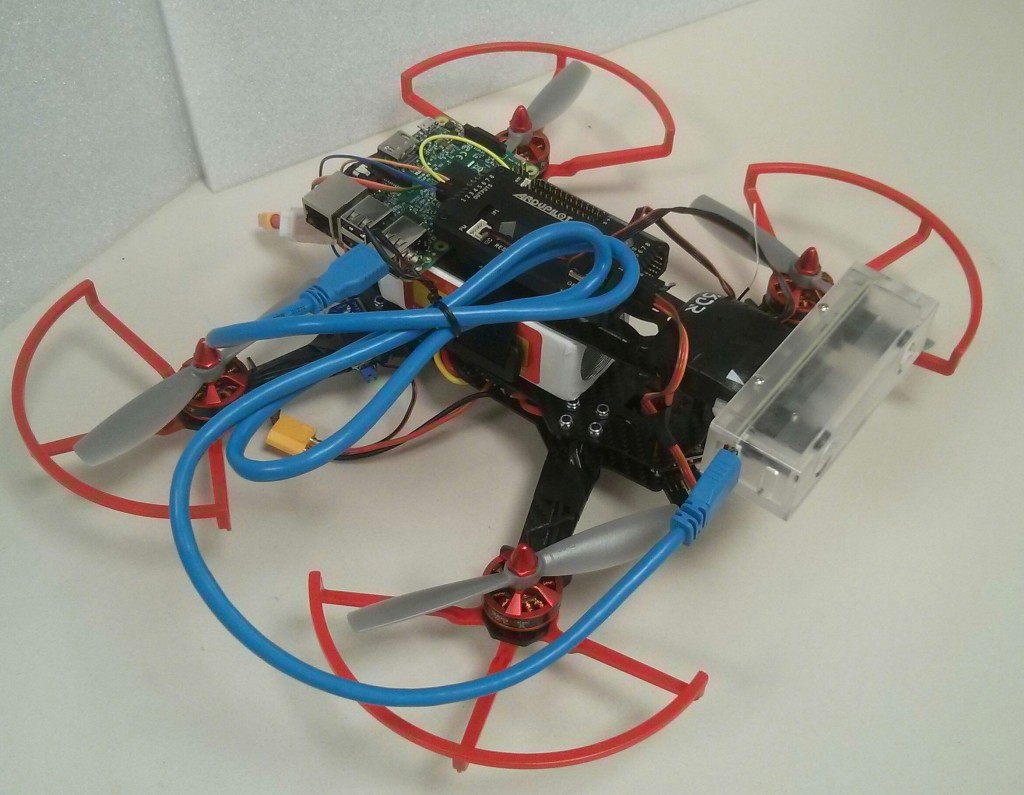
Skeleton |
Falcon |
Modified Iris+ |
Phoenix |
|
 |
 |
 |
 |
 |
 |
| Chassis Type |
Quad Y |
Quad X |
Quad X |
Quad Y |
Quad Y |
Quad Y |
| Frame Dimension |
887 mm |
450 mm |
450 mm |
220 mm |
– |
550 mm |
| Material |
Carbon Fiber |
Fiber |
Carbon Fiber Rod |
Carbon Fiber |
Fiber |
Fiber |
| Weight |
3840-4570 g |
1200 g |
1000 g |
500 g |
1200 g |
1200 g |
| Onboard Computer |
DJI-Dedicated |
DJI-Dedicated |
Raspberry Pi 3 B |
Raspberry Pi 3 B |
Raspberry Pi 3 B |
Raspberry Pi 3 B |
| Autopilot |
– |
Naza M V2 |
Pixhawk |
Pixhawk |
Pixhawk |
Pixhawk |
| Sensors |
IMU, GPS, Ultrasonic, Stereo Camera, Infrared Sensor |
IMU, GPS, Ultrasonic, Stereo Camera |
IMU, GPS |
IMU, GPS |
IMU, GPS |
IMU, GPS, Sonar, Lidar |
| Battery |
4280 mAh |
5500 mAh |
6500 mAh |
4500 mAh |
5300 mAh |
6500 mAh |
| Endurance |
max. 38 mins |
30 mins |
40 mins |
35 mins |
22 mins |
35 mins |
| Pay Load Capacity |
1570-2300 g |
100 g |
700 g |
100 g |
200 g |
500 g |
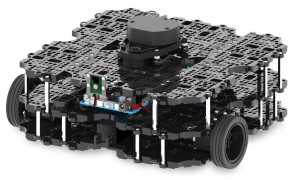
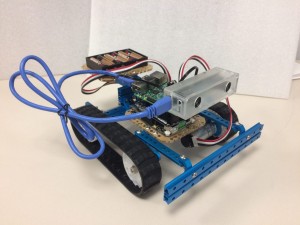
Mobile Ground Robots
 |
 |
 |
 |
| Turtlebot 3 Waffle Pi |
e-puck 2 |
MakeBlock |
Race Robot |
Equipment
In ADAMS Lab, since we are working on diverse topics ranging from Robotics to health-related technologies, the lab equipped with 3 Novint Falcon haptic (3D touch) devices, one full-body motion capture system, a Kinect sensor, a Wii balance board, a Myo armband, and a tool to measure the trust.
 |
 |
 |
 |
 |
| Novint Falcon |
Synertial IGS-150 |
Kinect Sensor |
Wii Balance Board |
Myo Armband |