Robotic systems, often working collaboratively as a team of multiple autonomous agents, are becoming valuable players in different real-world applications; these include search and rescue, disaster response, goods delivery, and inventory management services. Coordinating a large team of robots using a centralized algorithm is often computationally intractable, demonstrates poor scalability, and is vulnerable to communication disruptions. Our research focuses on multiple aspects of swarm robotics.
Multi- and swarm-robotic search
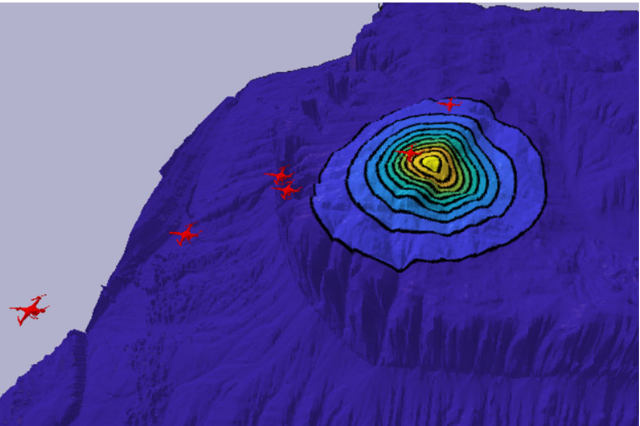
Swarm robotic search is concerned with searching for or localizing targets in unknown environments with a large number of collaborative robots. There exists a class of search problems in which the goal is to find the source or target with maximum strength (often in the presence of weaker sources), and where each source emits a spatially varying signal. Potential applications include source localization of gas leakage, nuclear meltdown tracking, chemical plume tracing, and magnetic field and radio source localization. In such applications, decentralized swarm robotic systems have been touted to provide mission efficiency, fault tolerance, and scalable coverage advantages, compared to sophisticated standalone systems. Here utilizing batch Bayesian concept, we proposed an asynchronous and decentralized swarm robotic algorithm to perform searching. To learn more about this, check this blog.
Swarm tactics for Seach and Rescue missions
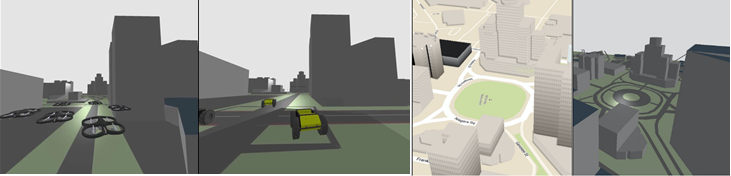
To accomplish complex swarm robotic missions in the real world, one needs to plan and execute a combination of single robot behaviors, group primitives such as task allocation, path planning, and formation control, and mission-specific objectives such as target search and group coverage. Most
such missions are designed manually by teams of robotics experts. Here we propose a new computational framework to learn the optimal policies for tactical planning of swarm robotic operations in complex urban environment with various adversaries. Our paper is awarded the best paper award in multi-agent and multi-robot systems (MRS), 2021. To learn more about this, check this blog.
Multi-robot Task Allocation
Efficient multi-robot task allocation (MRTA) is fundamental to various time-sensitive applications such as disaster response, warehouse operations, and construction. MRTA involves using a team of robots to perform tasks that are spatially distributed, and present time deadlines and different workloads that may require multiple visits by robots to complete the task. Our lab has published multiple papers, both learning based and optimization-based algorithms.
Graph learning
BiG-MRTA